
I2C Communication Protocol
I2C terminology
The configuration of I2C on AVR Atmega16
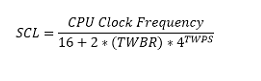
TWBR: TWI Bit Rate Register

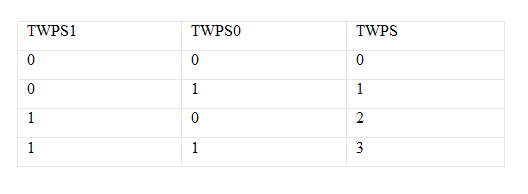
TWSR: TWI Status Register

TWCR: TWI Control Register

I2C Operation
1.Taking control of the TWI bus by sending a start signal to it when it is free
2. Start TWI Data Transmission
3. Receive TWI Data
4. Stop transmission and Release the TWI bus
EEPROM Write Data

Applications
/* Name : main.c
* Purpose : Source code for EEPROM interface with ATMEGA16.
* Author : Gemicates
* Date : 2017-09-12
* Website : www.gemicates.org
* Revision : None
*/
#ifndef F_CPU
#define F_CPU 8000000UL // 8 MHz clock speed
#endif
#include<avr/io.h>
#include<util/delay.h>
void init_i2c()
{
TWSR = 0X00;
TWBR = 0X47;
TWCR = (1<<TWEN);
}
unsigned char read_i2c()
{
TWCR = (1<<TWINT)|(1<<TWEN);
while(!(TWCR & (1<<TWINT)));
return TWDR;
}
void write_i2c(unsigned char ch)
{
TWDR = ch;
TWCR = (1<<TWINT)|(1<<TWEN)|(1<<TWEA);
while(!(TWCR&(1<<TWINT)));
}
void start()
{
TWCR = (1<<TWINT)|(1<<TWSTA)|(1<<TWEN);
while((TWCR &(1<<TWINT))==0);
}
void stop()
{
TWCR = (1<<TWINT)|(1<<TWEN)|(1<<TWSTO);
_delay_ms(1);
}
void eeprom_write(char dev_addr,char dev_loc,char dev_data)
{
start();
write_i2c(dev_addr);
write_i2c(dev_loc);
write_i2c(dev_data);
stop();
_delay_ms(10);
}
unsigned char eeprom_read(char dev_addr,char dev_loc)
{
char ch;
start();
write_i2c(dev_addr);
write_i2c(dev_loc);
start();
write_i2c(dev_addr|0x01);
ch = read_i2c();
stop();
return ch;
}
int main()
{
char ch,i;
DDRC =0XFF;
init_i2c();
for(i = 0;i<26;i++)
eeprom_write(0xa0,i,'A'+i);
for(i = 0;i<26;i++)
{
ch = eeprom_read( 0xa0 , i);
eeprom_write(0xa0,i+40,ch);
}
}